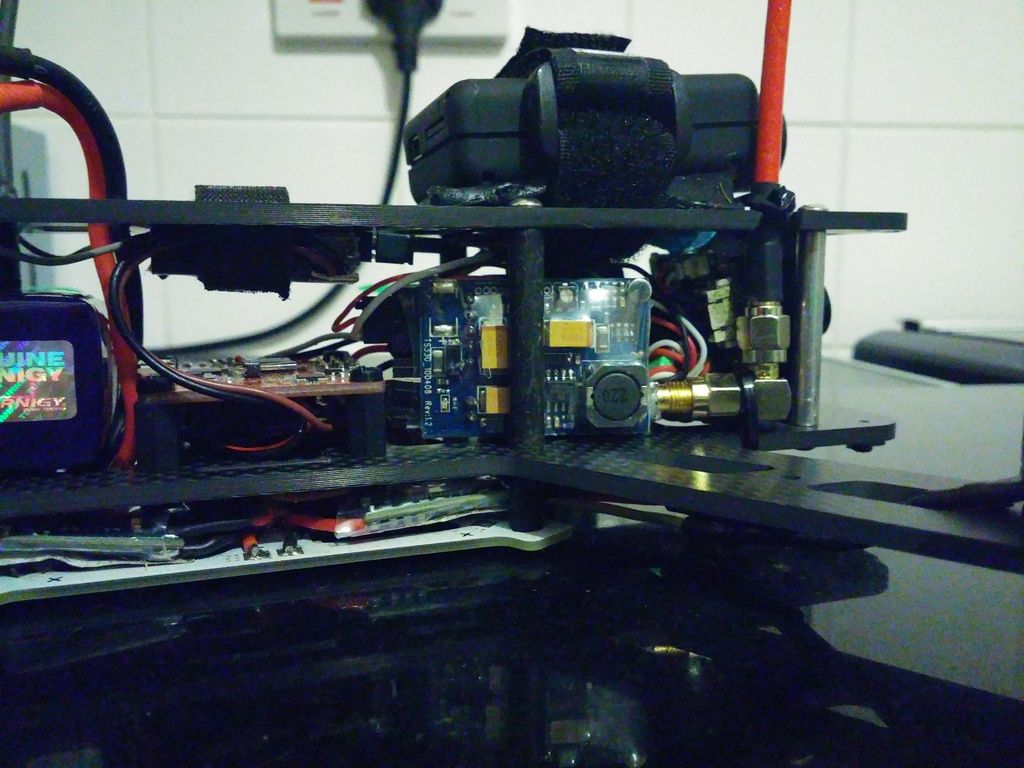
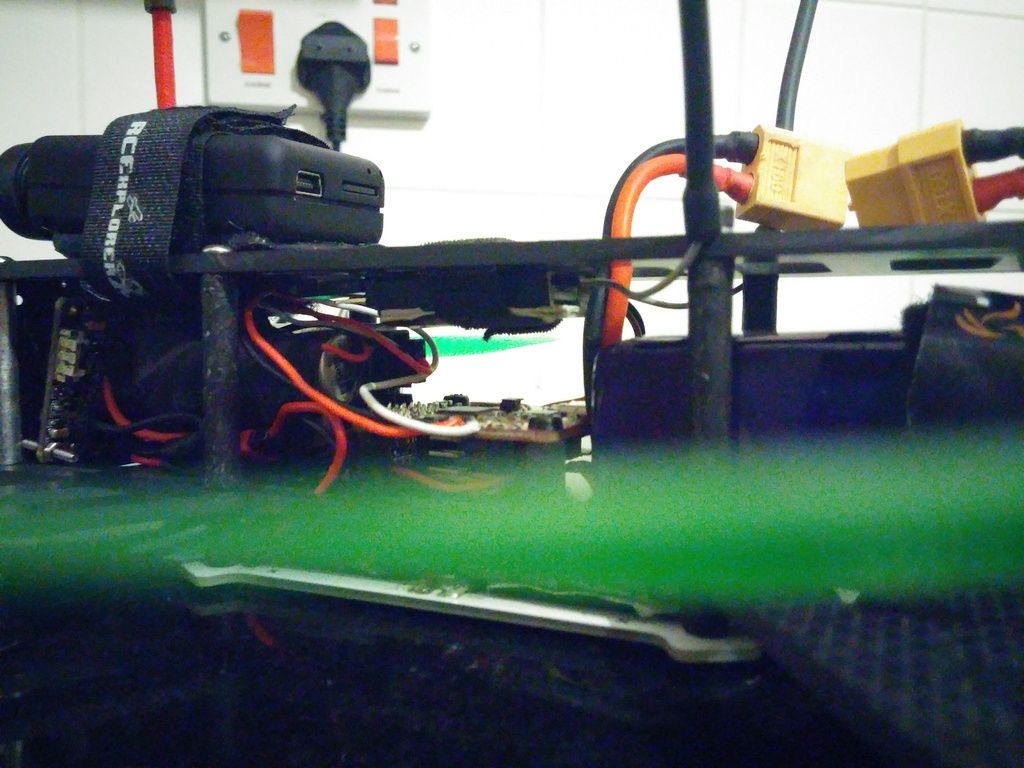
rebuilt the QAV today, I took the old bottom plate and cut the arms off to make a extended thicker top plate, turned out quite nice too. It will enable me to use a larger battery on top when I go 6" with the arm extensions and have ample mounting room underneath.
Mounted the VTX up front
Got some washer wire crimp terminals that worked out great for mounting the antenna.
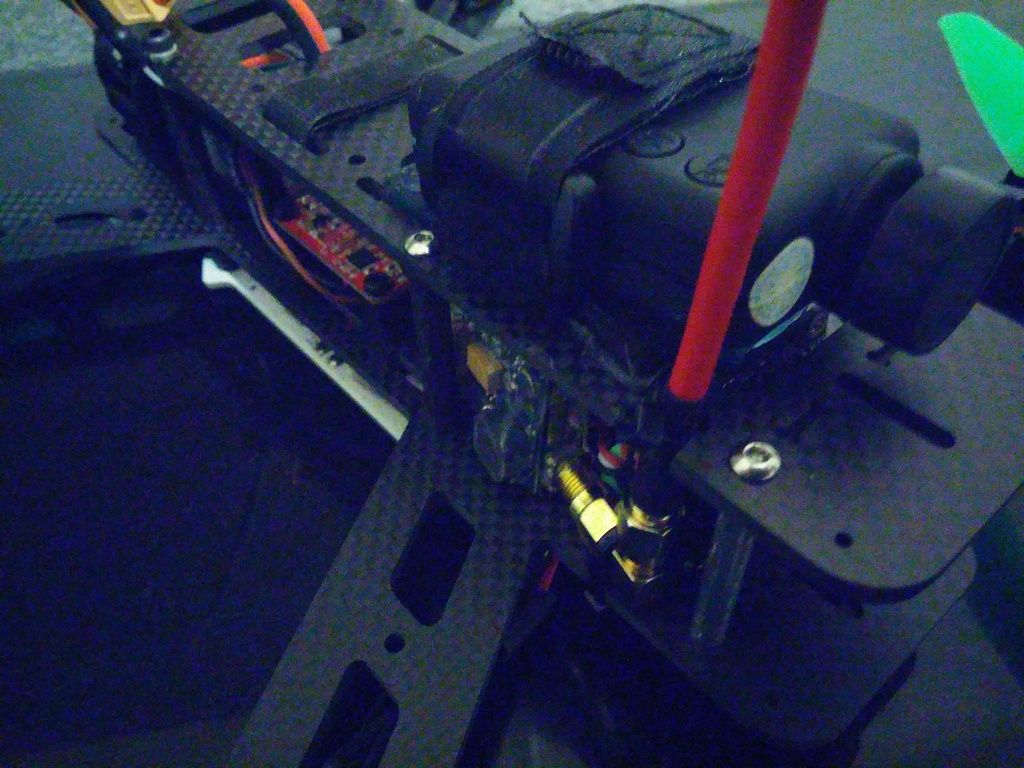
And finally to finish it off i tilted the camera for better viewing angle when flying fpv.
The hideous green props are some of the Gemfan 5040's i ordered, 40 arrived this morning and another 36 yet to arrive. Hopefully the weather is dry and not too windy tomorrow so i can take it out and test it, should be a beast!
I had tried the cleanflight pid controllers the other day before the fatal crash and wasnt impressed with the pids out of the box, seems very unstable and after a quick test hover today the oscillations with the 5040's on appeared very bad even just in a hover



")
") now to solder it and strap the ESC in place
now to solder it and strap the ESC in place


 nice reuse of plate
nice reuse of plate